Goal: 아이작심 소개 및 장점을 알아보자
Reference: Issac sim 홈페이지
시스콘 다닐때부터 관심이있었던 시뮬레이션 프로그램으로 nvidia 에서 만든 아이작 심을 공부해보자! 이번 석사과정을 하면서 논문에 같이 껴놓고 배우고싶은 프로그램이라 조금씩 배워보려한다. 목표는 ROS2와 연계한 Vision docking algorithm 개발 !
개인적으로 로봇을 하기위해서는 시뮬레이션이 필수라 보는데 그이유는 첫쨰로 비싼 하드웨어의 소유 제약에서 벗어나 가상공간에서 자유롭게 창의력을 펼칠 수 있는것. 둘쨰로는 가상공간에서 하드웨어의 강건성을 떠나 무한적으로 디버깅을 할 수 있는것. 셋째는 시뮬레이션 시간을 가속화 하여 real time에서 테스트하는것보다 빠르게 결과를 확인할 수 있는것이다(시간은 소중하니...). 그 전 회사에서도 Gazebo를 활용하여 극강의 효율?을 맛보았기 때문에 시뮬레이션 하나정도는 자유롭게 다룰수있어야한다고 생각. 특별히 아이작 심에서는 Gazebo에서 제공 할수없는 Synthethic data를 제공하기에 카메라를 이용한 시뮬레이션에서는 최적이지않을까.
아이작 심이란? (What is Isaac Sim) 엔비디아에서 로봇틱스 시뮬레이션 툴킷을 제공한것으로 omniverse platform에서 제공하는 여러 라이브러리중에 하나다.
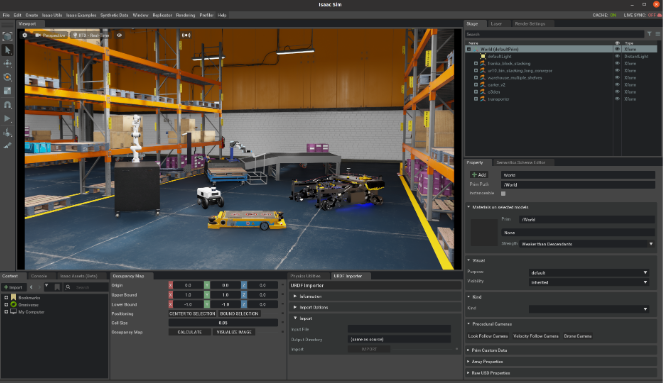
아이작 심은 네이비게이션과 매니퓰레이터 를 ROS1/2를 통해 서포트할 수 있고 여러 센서들!(Lidar, camera ,Imu etc)등 을 시뮬레이션 할 수 있다. (너무 리얼해보이네)

USD ? Universal Scene Description의 약자로 isaac sim의 기반 디스플레이기술로 오픈소스 3D scene description으로 파일포멧을 뜻하기도한다. 픽사에서 개발되었다고하는데 어쩐지 그래픽품질이 너무좋네.
그 많은 다양한 시뮬레이션중에 아이작의 장점이라고 하면 Synthetic data를 제공한다는것인데 이게 과연 무엇일까?

Synthetic data 란 모든 정보들이 표기된 인공 데이터로써 실제 공간에서 얻어진 데이터와다는 다르게 이미 모든것(라벨링,위치,색깔 etc..)을 가지고있는 데이터이다. 예를들어 카메라를 학습시키기위해 몇천장의 사진을 실제로 찍어 수백시간을들여 라벨링을 해야하는데 시뮬레이션 공간에서는 라벨링이 필요없이 여러 상황을 실제처럼 재구성하여 다양항 데이터로 로봇을 빠르게 학습 시킬수있다는것! 특히 학습을위한 공간 데이터를 풍부하게 제공해줄 수 있다.
내가 어디까지 아이작심을 이용할 수 있을지는 모르겠지만 이번에 차근차근 튜토리얼을 따라해보려한다. :)
'Self-Development > Learning Note' 카테고리의 다른 글
| [Youtube 정리] 세금 교육' 받은 홍진경 (문재완 세무사,연말정산,원천징수) (0) | 2023.05.04 |
|---|---|
| [Youtube 정리] 김승호회장의 사장학 개론 (3) | 2023.04.22 |
| [Youtube 정리][경제] 당장 실천해야 할 14가지 자수성가 계획법 (0) | 2022.10.14 |
| Git 연습하기-1 (0) | 2022.07.04 |
| [Basic] c 혹은 c++ 파일들 linux에서 컴파일 및 실행시키기 (0) | 2022.06.30 |




댓글