출처: How Starship Delivery Robots know where they are going
How Starship Delivery Robots know where they are going
(plus how to make your very own 1:8 scale papercraft robot model)
medium.com
아웃도어 로봇의 대표주자 스타쉽은 어떻게 위치를 측정하는지 설명하는 유일한 포스팅 정리
- 지도의 필요성:
- 로봇은 출발지(A)에서 도착지(B)로 효율적으로 이동하기 위해 경로를 계획해야 함.
- 자동차 네비게이션을 위한 기존 지도 서비스는 도로 중심으로 설계되어 보도와 같은 세부적인 정보가 부족함.
- ⇒cm 단위의 로컬라이제이션을 위해선 위성지도뿐 아니라 특별한 위치 추정맵이 필요하다고함
- 지도 생성 단계:
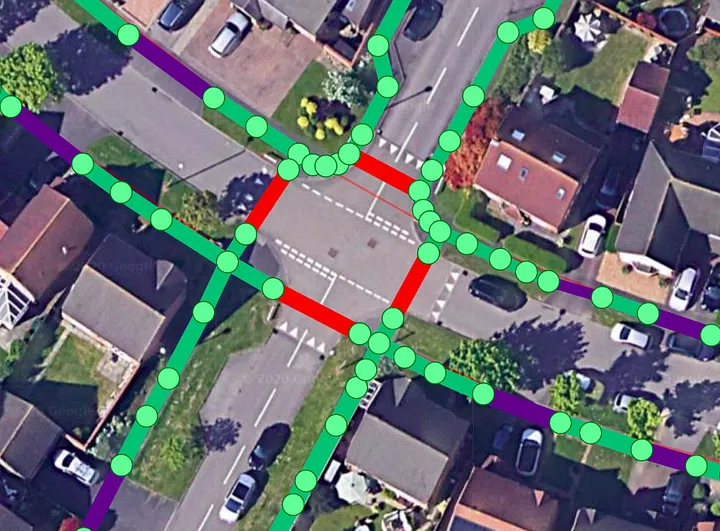
- 스카우팅과 2D 맵 생성: 관심 지역을 스카우트하고, 보도, 횡단보도, 주차구역 등을 2D 지도에 간단한 선으로 표시.
- 노드 그래프: 이 2D 맵을 노드 그래프로 취급하여 로봇이 안전하고 최단 경로를 식별하도록 함.
3.로봇의 환경 인식:
- 카메라와 센서 데이터 수집:로봇이 운행 중에 카메라 및 다양한 센서로 환경 데이터 수집.

- 오프라인 3D 맵 생성: 수집된 데이터를 기반으로 서버에서 오프라인 3D 맵 생성. 로봇은 이 맵을 활용하여 환경을 모델링.
- ⇒ STARSHIP은 좀더 정확한 위치 추정을위해 로봇이 실제 바라본 환경에 대한 오프라인 맵을 생성한다고한다. (keyword: GIS (Geographic Information System)-based 3D mapping solution)
4.여러 지역 통합 및 3D 맵 생성:
- 다양한 로봇의 맵 통합: 여러 로봇이 동시에 다양한 지역을 커버하기 위해 각 지역의 맵을 서버에서 하나의 통합된 3D 맵으로 조립.
- 컬러 라인 표시: 맵 조립시에 로봇이 수집한 데이터에 기반하여 각 지도 조각을 표시.

5. 자율주행을 위한 정확한 보도 지도화:
- 카메라 이미지 처리: 로봇이 환경을 탐험하며 수집한 카메라 이미지를 처리하여 정확한 보도의 위치와 너비를 계산.

- 2D 지도 참조: 이미 생성된 2D 지도를 활용하여 로봇이 정확한 위치를 파악하고 안전한 구역을 정의.
6. 지속적인 맵 업데이트:
- 일상적인 변화 대응: 로봇의 소프트웨어는 작은 또는 중간 규모의 환경 변화에 대응 가능.
- 데이터 수집과 지도 업데이트: 로봇은 매일 주행하면서 추가 데이터를 수집하여 3D 맵을 지속적으로 업데이트.
7. 맵 업데이트의 중요성:
- 로봇 안전 및 자율주행: 지속적인 맵 업데이트는 로봇이 안전하고 자율주행할 수 있도록 보장함.
- 환경 변화 대응: 일상적인 변화나 공사 등에 유연하게 대응 가능.

Summary
- Starship 위치추정 단계 요약 : [토폴로지맵] ⇒ [실제 로봇 센서를 통한 오프라인 3D map 생성 ⇒ 여러지역 통합 3D Map 생성 ⇒ 보도구역 세부 지도화]
- Starship도 세부적인 위치추정을 위해 local map을 만들어 사용중으로 보이나 굉장히 자동화가 많이되어 효율적으로 local map을 제작하는것으로 보임
'Robotics Engineer > Robot Perception' 카테고리의 다른 글
| [Robot Perception] Object detection tutorial 따라하기(1) (1) | 2023.04.26 |
|---|---|
| [vision] 2탄: CNN 이라는게 무엇인지 대략 알아보기 (1) | 2023.01.09 |
| [paper review]Current State of the Art in Object Detection for Autonomous Systems (1) | 2023.01.05 |
| [paper review] A Survey on Object Detection and Tracking Methods(2014) (0) | 2022.12.30 |
| [Vision] 1편: 모바일 로봇 비전 공부를 시작함에 앞서(overview) (1) | 2022.12.27 |




댓글